现在大家对于无人驾驶汽车的概念越来越热,但是大家知道什么是无人驾驶吗,以及是什么组成了无人驾驶系统健康的运行呢?
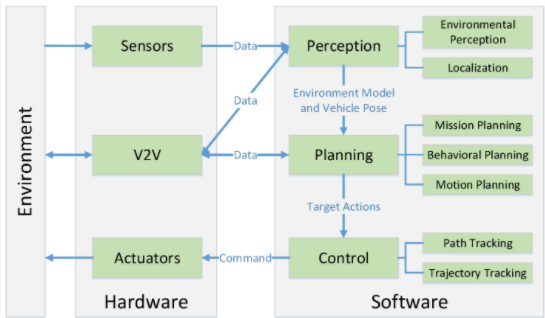
无人驾驶系统的核心可以概述为三个部分:感知(Perception),规划(Planning)和控制(Control),这些部分的交互以及其与车辆硬件、其他车辆的交互可以用下图表示:
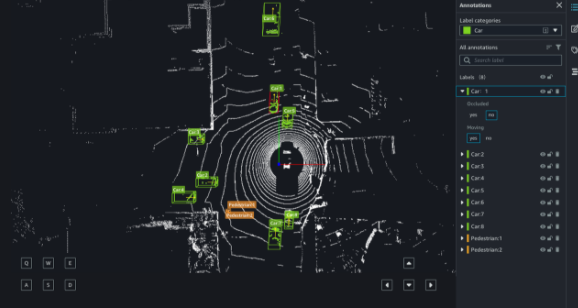
我们具体描述一下第一个部分,其余的部分且听下回分解。环境感知为了确保无人车对环境的理解和把握,无人驾驶系统的环境感知部分通常需要获取周围环境的大量信息,具体来说包括:障碍物的位置,速度以及可能的行为,可行驶的区域,交通规则等等。无人车通常是通过融合激光雷达(Lidar),相机(Camera),毫米波雷达(Millimeter Wave Radar)等多种传感器的数据来获取这些信息,本节我们简要地了解一下激光雷达和相机在无人车感知中的应用。激光雷达是一类使用激光进行探测和测距的设备,它能够每秒钟向环境发送数百万光脉冲,它的内部是一种旋转的结构,这使得激光雷达能够实时的建立起周围环境的3维地图。通常来说,激光雷达以10Hz左右的速度对周围环境进行旋转扫描,其扫描一次的结果为密集的点构成的3维图,每个点具备(x,y,z)信息,这个图被称为点云图(Point Cloud Graph),如下图所示,是使用Velodyne VLP-32c激光雷达建立的一个点云地图:激光雷达因其可靠性目前仍是无人驾驶系统中最重要的传感器,然而,在现实使用中,激光雷达并不是完美的,往往存在点云过于稀疏,甚至丢失部分点的问题,对于不规则的物体表面,使用激光雷达很难辨别其模式,在诸如大雨天气这类情况下,激光雷达也无法使用。
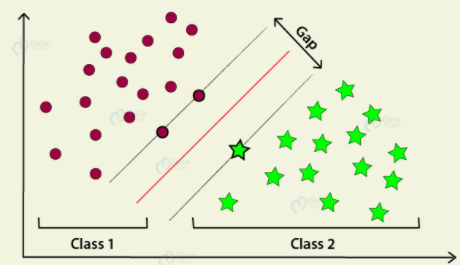
为了理解点云信息,通常来说,我们对点云数据进行两步操作:分割(Segmentation)和分类(Classification)。其中,分割是为了将点云图中离散的点聚类成若干个整体,而分类则是区分出这些整体属于哪一个类别(比如说行人,车辆以及障碍物)。分割算法可以被分类如下几类:基于边的方法,例如梯度过滤等;基于区域的方法,这类方法使用区域特征对邻近点进行聚类,聚类的依据是使用一些指定的标准(如欧几里得距离,表面法线等),这类方法通常是先在点云中选取若干种子点(seed points),然后使用指定的标准从这些种子点出发对邻近点进行聚类;参数方法,这类方法使用预先定义的模型去拟合点云,常见的方法包括随机样本一致性方法(Random Sample Consensus,RANSAC )和霍夫变换(Hough Transform,HT);基于属性的方法,首先计算每个点的属性,然后对属性相关联的点进行聚类的方法;基于图的方法;基于机器学习的方法;在完成了点云的目标分割以后,分割出来的目标需要被正确的分类,在这个环节,一般使用机器学习中的分类算法,如支持向量机(Support Vector Machine,SVM)对聚类的特征进行分类,最近几年由于深度学习的发展,业界开始使用特别设计的卷积神经网络(Convolutional Neural Network,CNN)对三维的点云聚类进行分类。然而,不论是提取特征-SVM的方法还是原始点云-CNN的方法,由于激光雷达点云本身解析度低的原因,对于反射点稀疏的目标(比如说行人),基于点云的分类并不可靠,所以在实践中,我们往往融合激光雷达和相机传感器,利用相机的高分辨率来对目标进行分类,利用Lidar的可靠性对障碍物检测和测距,融合两者的优点完成环境感知。在无人驾驶系统中,我们通常使用图像视觉来完成道路的检测和道路上目标的检测。道路的检测包含对道路线的检测(Lane Detection),可行驶区域的检测(Drivable Area Detection);道路上路标的检测包含对其他车辆的检测(Vehicle Detection),行人检测(Pedestrian Detection),交通标志和信号的检测(Traffic Sign Detection)等所有交通参与者的检测和分类。车道线的检测涉及两个方面:第一是识别出车道线,对于弯曲的车道线,能够计算出其曲率,第二是确定车辆自身相对于车道线的偏移(即无人车自身在车道线的哪个位置)。一种方法是抽取一些车道的特征,包括边缘特征(通常是求梯度,如索贝尔算子),车道线的颜色特征等,使用多项式拟合我们认为可能是车道线的像素,然后基于多项式以及当前相机在车上挂载的位置确定前方车道线的曲率和车辆相对于车道的偏离。可行驶区域的检测目前的一种做法是采用深度神经网络直接对场景进行分割,即通过训练一个逐像素分类的深度神经网络,完成对图像中可行驶区域的切割。交通参与者的检测和分类目前主要依赖于深度学习模型,常用的模型包括两类:以RCNN为代表的基于Region Proposal的深度学习目标检测算法(RCNN,SPP-NET,Fast-RCNN,Faster-RCNN等);以YOLO为代表的基于回归方法的深度学习目标检测算法(YOLO,SSD等)内容来源:无人驾驶视界 文章版权归作者所有,仅代表作者个人观点,如有侵权,请联系,谢谢!
“亿融创服”是深圳市亿融创服科技有限公司于2017年9月正式运营的集创业服务、产业招商于一体的综合服务平台。公司通过整合企业、政府、园区、服务机构等资源,为政府、园区提供产业咨询、产业招商、基金运营等产业服务;同时以资本对接、异业合作等形式为企业提供资本、财税、法律、办公场地、融资、上市咨询等创业辅导服务,解决市场信息不对称问题,助力企业创业成功。亿融创服已平稳运营3年多,产品和服务日趋完善,即将进入发展爆发期。截止2020年12月,亿融创服共服务了60000多家企业、2000多家投资机构、100多家服务机构以及30余家地方政府。举办的资本对接会中,共计150家创业企业进行路演,20多家企业成功获得了投资,融资总额达到5个亿。同时,协助了20多家企业业务外延落地,落地区域涉及全国地区。目前,亿融创服APP端、PC端以及小程序都已开通并运营,并且通过线下活动分别与中山市发改局、深圳市盐田区经济促进局、浙江省衢州市、四川省泸州市、江西省宜春市、成都天府新区华阳街道、佛山市顺德区、深圳市南山区科创中心、成都青白江区、深圳国际商会、深圳市宝安区科技创新服务中心、深圳市南山区科技创新局、深圳市光明区科技创新局、中国科学院云计算产业技术创新与育成中心等合作,主办或承办了近百场涉及生命大健康、智慧社区、教育、新能源、新材料、芯片、智慧物流、智慧城市、文化旅游、物联网、先进制造、智能硬件、电子信息、人工智能等行业的资本对接会(天使轮到B轮)、科创板资本对接会(B轮到D轮)、创业大赛及科创服务活动,同时为地方政府举办招商推介会(近十场),协助企业外延落地,协助各地政府招商引资,通过亿融创服平台解决产业招引信息不对称。成功打通了线上和线下的互通结合,真正为企业创业提供了有力支持,在业内获得了较好的口碑。